تصميم نظام التركيز ثنائي المجال للأشعة تحت الحمراء المعتمد على DSP
- حصة
- وقت مسألة
- 2022/4/12
ملخص
تُستخدم أنظمة المجال المزدوج بالأشعة تحت الحمراء على نطاق واسع في معدات الاستطلاع الإلكترونية البصرية. في هذا البحث، وفقا لخصائص العمل للنظام البصري بالأشعة تحت الحمراء ثنائي المجال، تم تصميم مجموعة من نظام تركيز العدسات البصرية على أساس DSP.
يمكن للنظام البصري بالأشعة تحت الحمراء ثنائي المجال أن يوفر صورتين بتكبير مختلف ومجالات رؤية مختلفة في نفس الوقت. مجال كبير في النظام منخفض الدقة ويستخدم للبحث عن الأهداف في نطاق كبير؛ يتم استخدام حقل صغير لتحديد وتحليل وتأكيد أهداف محددة. ولذلك، فإن نظام مجال الرؤية المزدوج بالأشعة تحت الحمراء يستخدم على نطاق واسع في معدات الاستطلاع الإلكترونية الضوئية المحمولة جواً، والمحمولة على المركبات، وغيرها.
في هذا البحث، وفقًا لخصائص العمل والمتطلبات الفنية للنظام البصري بالأشعة تحت الحمراء ثنائي المجال، تم تصميم مجموعة من أنظمة تركيز العدسات البصرية المعتمدة على DSP. من خلال تطبيق فكرة تصميم التكامل البصري الميكانيكي، يتم تحقيق وظائف التبديل السريع والتركيز لمجالات الرؤية الكبيرة والصغيرة من خلال التحرك المتوازي لمجموعة العدسات البصرية على طول المحور.
1 تصميم نظام التركيز
1.1 اختيار طريقة التركيز
عادة، ينقسم نظام تكبير مجال الرؤية المزدوج إلى فئتين: في مجال الرؤية المزدوج عدسة الأشعة تحت الحمراء ، ومجموعة العدسات البصرية تتحرك للداخل والخارج بنظام تبديل التكبير ونظام تكبير ثنائي الموضع. يتطلب نظام التكبير/التصغير القابل للتحويل إدخال جزء من العدسة في الموضع المناسب لتغيير البعد البؤري للنظام البصري، وبالتالي يكون الحجم الجانبي كبيرًا. يغير نظام الوضع المزدوج الطول البؤري للنظام عن طريق تغيير المسافة المحورية لمجموعة العدسات، مما يمكن أن يقلل بشكل فعال من حجم النظام، ويمكنه تحقيق وظائف تبديل مجال الرؤية والتركيز الدقيق في نفس الوقت. .
مع الأخذ في الاعتبار متطلبات الجودة وحجم المساحة للنظام العام، تم اعتماد نظام تكبير مزدوج الموضع يحرك مجموعة العدسات البصرية بالتوازي على طول المحور. يتكون نظام التكبير ذو الوضعين من مجموعة أمامية ثابتة، ومجموعة عدسات متحركة، ومجموعة خلفية ثابتة. يظهر مبدأ عمله في الشكل 1. عندما تكون مجموعة العدسات المتحركة في الموضع 1، يكون النظام في حالة طول بؤري قصير (مجال رؤية كبير)، وعندما تكون مجموعة العدسات المتحركة في الموضع 2، يكون النظام في وضع التشغيل في حالة البعد البؤري الطويل (مجال رؤية صغير).
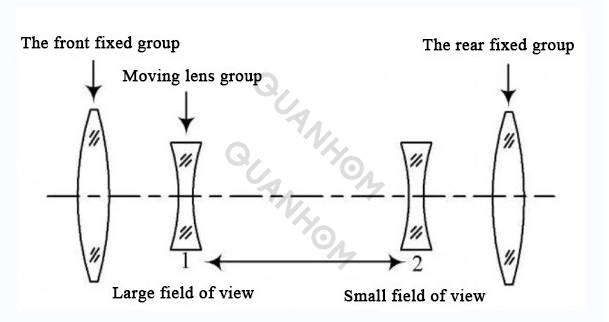
الشكل 1: رسم تخطيطي لبصريات الأشعة تحت الحمراء ذات المجال المزدوج
1.2 تصميم نظام التركيز على الحركة
يتكون نظام حركة التركيز بالكامل من نظام تحكم مغلق الحلقة مع وحدة تحكم DSP باعتبارها القلب. يظهر الرسم التخطيطي للنظام في الشكل 2. ويتكون بشكل أساسي من الأجزاء التالية: وحدة التحكم DSP، ومحرك مؤازر، ومسمار الرصاص، ووحدة الانزلاق، والدليل الخطي الدقيق، ومسطرة الشبكة الخطية، وما إلى ذلك. تتحكم وحدة DSP في الدوران للمحرك بعد قبول أمر التحكم للكمبيوتر المضيف وتغيير الحركة الدورانية للمحرك إلى الحركة الخطية المحورية لمجموعة المرآة المتحركة من خلال آلية حركة الدليل اللولبي. تكتشف مسطرة الشبكة الخطية الوضع الحالي لمجموعة العدسات المنزلقة وتقوم بإعادتها إلى معالج الإشارة الرقمية. تقوم وحدة التحكم DSP بمقارنة الموضع الحالي لمجموعة العدسات المتحركة مع الموضع المحدد للنظام، وتتحكم أيضًا في المحرك لدفع مجموعة العدسات للتحرك على طول الاتجاه المحوري حتى تصل مجموعة العدسات المتحركة إلى الموضع المحدد للنظام.
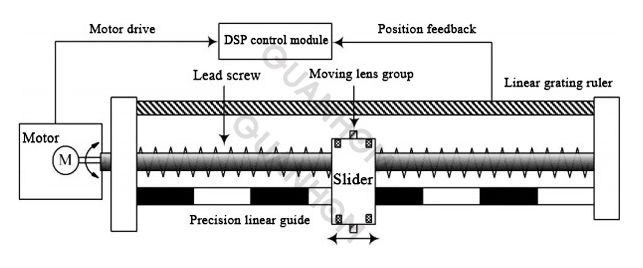
الشكل 2: رسم تخطيطي لنظام التركيز
2 التركيز على تصميم أجهزة النظام
تعتمد دائرة الأجهزة لنظام التركيز على وحدة تحكم DSP. TMS320LF 2407A عبارة عن معالج إشارات رقمية بنقطة ثابتة 16 بت. فهو يدمج قدرات معالجة الإشارات الرقمية عالية السرعة والدوائر الطرفية المحسنة المناسبة للتحكم في المحرك، مما يوفر للتحكم في المحرك مجموعة من الحلول الرقمية ذات الدقة العالية والأداء العالي في نفس الوقت. يدور تصميم الدائرة الطرفية لنظام التحكم حول TMS320LF 2407A، والذي يتكون بشكل أساسي من الأجزاء الأساسية التالية: دائرة واجهة الاتصال التسلسلي مع الكمبيوتر المضيف، ودائرة محرك الطاقة، ودائرة اكتشاف الموقع، وما إلى ذلك. يظهر الرسم التخطيطي لنظام التحكم في الشكل 3.

الشكل 3: مخطط كتلة أجهزة نظام التحكم DSP
2.1 دائرة الاتصالات التسلسلية SCI
يمكن للنظام تحقيق الاتصال بين DSP والكمبيوتر المضيف من خلال وحدة الاتصال التسلسلي SCI المدمجة بواسطة شريحة TM S320LF 2407A. تعتمد الدائرة الكمبيوتر المضيف لرقاقة التشغيل MAX232 الذي يتوافق مع معيار RS232 لإرسال أوامر التحكم إلى وحدة التحكم DSP. يستجيب نظام DSP لأوامر التحكم عن طريق حساب الموضع المحدد لمجموعة العدسات المتحركة، والتحكم في حركة المحرك لإكمال تركيز النظام، وفي الوقت نفسه، إرسال تعليقات حول حالة العمل الحالية لنظام التحكم في التركيز إلى الكمبيوتر المضيف.
2.2 دائرة الكشف عن الموقع
مفتاح التحكم الدقيق في موضع مجموعة العدسات المتحركة هو اكتشاف إزاحتها. تم اختيار مسطرة الشبكة الدقيقة RGH22 من شركة Renishaw في المملكة المتحدة لتكون مستشعر الموضع بدقة 2μm. إشارة الخرج عبارة عن تغيرين في التردد ومتعامد (أي نبضة بفارق طور قدره 90 درجة). يحتوي رأس القراءة الخاص به على مفاتيح ذات حد صفري ومزدوج. يوفر الصفر المرجعي أصلًا مرجعيًا قابلاً للتكرار أو نقطة الصفر، ويمكن لمفتاح الحد إخراج إشارة عندما تصل الحركة المحورية إلى نقاط الحد عند كلا الطرفين لإيقاف المحرك.
يحتوي كل مدير حدث EV في TMS320LF 2407A على دائرة نبضية تربيعية مفككة التشفير QEP، والتي يمكنها تشفير وحساب نبضات الإدخال التي تم فك تشفيرها تربيعيًا الناتجة عن مسطرة الشبكة. بعد أن تقوم المسطرة الشبكية بتوليد نبضة تشفير التربيع وإرسالها إلى دائرة تشفير التربيع، يمكن لدائرة QEP تحديد الاتجاه المتحرك لمجموعة العدسات المتحركة عن طريق الكشف عن تسلسل التسلسلين، وإزاحة التيار وسرعة المرآة المتحركة يمكن حساب المجموعة من خلال عدد النبض وتردد النبض. نظرًا لأن إخراج الشبكة، فإن المسطرة عبارة عن إشارة مستوى رقمي 5 فولت، ويمكن لـ DSP قبول إشارة المستوى 3.3 فولت فقط، ويتم استخدام شريحة SN74LV C245 كدائرة واجهة تحويل المستوى بين DSP ورأس قراءة الشبكة.
2.3 دائرة قيادة المحرك
في نظام التركيز، لا يكفي إخراج إشارة PWM بواسطة DSP بعد معالجة المعلومات المجمعة لتشغيل المحرك مباشرة، وهناك حاجة إلى شريحة تشغيل لتحويلها إلى إشارة محرك يمكنها تشغيل المحرك. دائرة قيادة المحرك تعتمد شريحة قيادة المحرك L298N من شركة SGS. إنها شريحة محرك مزدوجة على شكل H مع جهد ثابت وتيار ثابت، والتي يمكنها التحكم في محركين بتيار مستمر في نفس الوقت، ويمكن أن يصل تيار الإخراج إلى 2A. من أجل تقليل تأثير دائرة القيادة على نظام التحكم، تكون إشارة PWM الناتجة عن DSP في عزلة إلكترونية ضوئية بواسطة optocoupler TLP521 ثم يتم إرسالها إلى شريحة المحرك L298، مما يجعل إشارة التحكم في النظام مستقرة وموثوقة. بالإضافة إلى ذلك، من الناحية العملية، لحماية المحرك، يجب إضافة مجموعتين من الثنائيات الحرة إلى دائرة القيادة.
3 النتائج التجريبية
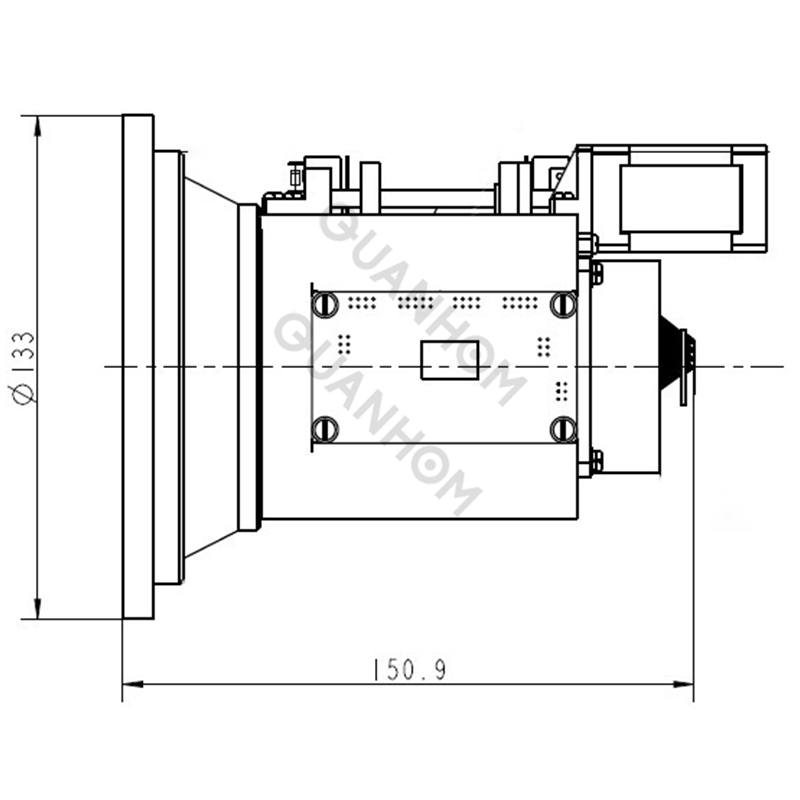
نطاق العمل للنظام البصري بالأشعة تحت الحمراء ثنائي المجال هو 3-5 ميكرومتر. يبلغ عرض مجال الرؤية 24°×18°، ومجال الرؤية الضيق 4°×3°. البعد البؤري القصير 20 ملم، والبعد البؤري الطويل 145 ملم. تبلغ مسافة التبديل بين مجالات الرؤية الكبيرة والصغيرة 125 مم، ودقة تحديد المواقع المطلوبة لمجموعة العدسات المتحركة أقل من 20 ميكرومتر. من خلال الاختبارات التجريبية، يمكن لنظام التركيز التبديل بين مجالات الرؤية الكبيرة والصغيرة خلال 1 ثانية، ويمكن أن تصل دقة التركيز إلى 5μm، وهو ما يلبي دقة تحديد المواقع المطلوبة من قبل النظام. ويبين الشكل 4 صور النظام البصري بالأشعة تحت الحمراء تحت مجالات الرؤية الكبيرة والصغيرة، على التوالي.

الشكل 4: النظام البصري مجال عرض الصور الكبير والصغير
4. الخلاصة
يقدم هذا البحث نظام التحكم في تركيز العدسة البصرية بالأشعة تحت الحمراء ثنائي المجال، والذي يعتمد الحركة المحورية لمجموعة العدسات المتحركة لتحقيق التكبير. هناك حاجة إلى مجموعة واحدة فقط من الأجهزة الكهروميكانيكية لتحقيق وظائف تبديل مجال الرؤية والتركيز في نفس الوقت، وبالتالي التحكم بشكل فعال في الأبعاد المحورية، مما يجعل هيكلها أكثر إحكاما. يعتمد نظام التحكم شريحة TMS320LF 2407A عالية الأداء كوحدة تحكم للنظام، مما يجعل تصميم دائرة الأجهزة بأكملها بسيطًا وموثوقًا. إنه يلبي متطلبات نظام التصوير البصري بالأشعة تحت الحمراء لتبديل مجال الرؤية السريع ودقة التركيز العالية.
Quanhom هو مورد محترف لعدسات الأشعة تحت الحمراء ومكونات الأنظمة . يتفوق فريق البحث والتطوير المتطور لدينا في تصميم وتصنيع مفاهيم منتجات البصريات الحرارية التي تعمل بالأشعة تحت الحمراء بسلاسة. بدءًا من التجميعات الفرعية البسيطة لعناصر عدسات الأشعة تحت الحمراء وحتى التجميعات الميكانيكية والكهربائية الضوئية المعقدة والمتطورة والموثوقة. إذا كنت في حاجة، يرجى الاتصال بنا .
مراجع
[1] رن ده تشينغ. التصميم البصري للعدسة ذات المجال المزدوج بالأشعة تحت الحمراء [J]. تكنولوجيا الأشعة تحت الحمراء، 1998،20(3):19-22.
[2] تشين لفجي. نظام بصري مزدوج المجال للأشعة تحت الحمراء للتصوير الحراري للمستوى البؤري غير المبرد [J]. تكنولوجيا الأشعة تحت الحمراء، 2007،29(11):645-647.
[3] يانغ يولونغ، غوان فولين، تشانغ توكياو، وآخرون. تصميم نموذج والتحكم في آلية التركيز لمرآة التصوير للتلسكوب الشمسي الفضائي [J]. الهندسة الميكانيكية الصينية، 2006، 8(17): 313-316.
[4] ليو هيبينج، يان ليبينج، تشانغ شيوفنغ، وآخرون. TM S320LF240x DSP المبدأ الهيكلي
والتطبيق [م]. بكين: مطبعة جامعة بكين للملاحة الجوية والفضائية، 2002.
[5] ليو جينكون. محاكاة ماتلاب للتحكم PID المتقدم [M]. بكين: مطبعة الصناعة الإلكترونية، 2004.
[6] هو جين، تشونغ شينغرونغ، وانغ جيا جون. بحث حول التصوير بالأشعة تحت الحمراء القريبة على أساس طريقة مجال التردد
[ي]. التكنولوجيا الإلكترونية الحديثة، 2007، 30(22):125-126.
[7] لي يون هونغ، لي جونهوا، لي باي. تطبيق تقنية التصوير الحراري بالأشعة تحت الحمراء في محطات توليد الطاقة [J].
التكنولوجيا الإلكترونية الحديثة، 2008، 31(6):181-183.